Nous donnons dans cette section une introduction à la théorie
générale des espaces probabilisés, telle que fondée par Kolmogorov.
Cette théorie permet de traiter de manière unifiée les espaces
probabilisés discrets, les variables aléatoires à densité, et bien
d'autres situations. La construction comporte trois étapes principales:

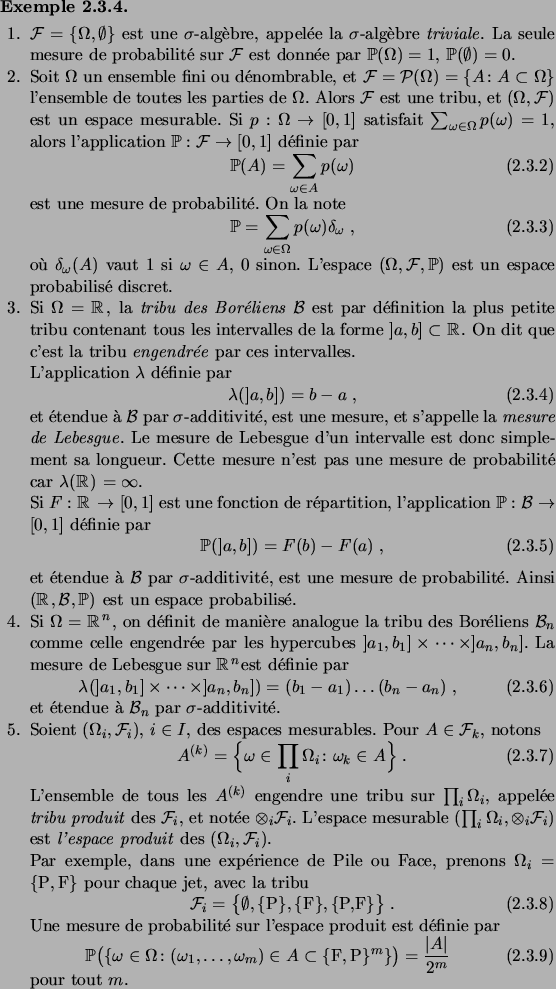
Les fonctions mesurables d'un espace probabilisé sont donc simplement
celles pour lesquelles on peut définir
![]() pour tout
Borélien
pour tout
Borélien ![]() .
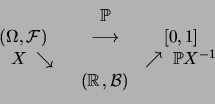
La situation est symbolisée dans le diagramme suivant (notons que
.
La situation est symbolisée dans le diagramme suivant (notons que ![]() ,
étant mesurable, peut être identifiée à une application de
,
étant mesurable, peut être identifiée à une application de ![]() dans
dans ![]() ):
):
Finalement, il nous faut définir la notion d'intégrale sur un espace mesuré ou probabilisé. Nous nous bornerons ici à donner les définitions et le résultat principal.
Ce résultat justifie la définition suivante.
Dans le cas particulier
![]() , l'intégrale
introduite ci-dessus s'appelle l'intégrale de Lebesgue. Par
définition, l'intégrale de Lebesgue d'une fonction simple est égale
à la surface comprise sous le graphe de cette fonction, donc
à son intégrale de Riemann. Par conséquent, si une fonction est
intégrable selon Riemann, son intégrale de Lebesgue est égale à son
intégrale de Riemann, et on écrit
, l'intégrale
introduite ci-dessus s'appelle l'intégrale de Lebesgue. Par
définition, l'intégrale de Lebesgue d'une fonction simple est égale
à la surface comprise sous le graphe de cette fonction, donc
à son intégrale de Riemann. Par conséquent, si une fonction est
intégrable selon Riemann, son intégrale de Lebesgue est égale à son
intégrale de Riemann, et on écrit
Revenons maintenant au cas particulier d'un espace probabilisé.
On notera que les notations suivantes sont toutes équivalentes:
![\begin{definition}[Tribu]
Soit $\Omega$\ un ensemble. Une famille non vide $\cF$...
... de $\cF$,
on a $\bigcup_{n=1}^\infty A_n\in\cF$.
\end{itemiz}\end{definition}](img411.png)
![\begin{definition}[Mesure de probabilit\'e]
Une\/ \defwd{mesure}\/ sur une tribu...
...ne\/ \defwd{mesure de
probabilit\'e}\/, et on la notera $\fP$.
\end{definition}](img412.png)
![\begin{definition}[Espace probabilis\'e]
Si $\cF$\ est une tribu sur $\Omega$, $...
...e, $(\Omega,\cF,\fP)$\ est un\/ \defwd{espace probabilis\'e}\/.
\end{definition}](img413.png)
![\begin{definition}[Application mesurable]\hfill
\begin{itemiz}
\item Si $(\Omega...
...nction continue $f:
\R\to\R$\ est $\cB$-mesurable.
\end{itemiz}\end{definition}](img415.png)
![\begin{definition}[Variable al\'eatoire]\hfill
\begin{itemiz}
\item Si $(\Omega,...
...e la\/ \defwd{fonction de r\'epartition}\/ de $X$.
\end{itemiz}\end{definition}](img416.png)
![\begin{definition}[Int\'egrale d'une fonction simple]\hfill
\par\noindent
Soit $...
... \6\mu = \sum_{i=1}^k a_i \mu(A_i)\;.
\end{equation}\end{itemiz}\end{definition}](img422.png)
![\begin{theorem}
Toute fonction mesurable $f: \Omega\to[0,\infty]$\ peut s'\'ecri...
...te et ne d\'epend pas de la suite de $e_n$\ convergeant vers $f$.
\end{theorem}](img423.png)
![\begin{definition}[Int\'egrale d'une fonction mesurable]\hfill
\begin{itemiz}
\i...
...lles que l'int\'egrale de $\abs{X}^p$\ soit finie.
\end{itemiz}\end{definition}](img424.png)

![\begin{definition}[Esp\'erance]
Soit $X$\ une variable al\'eatoire sur un espace...
...ec{\varphi(X)} = \int_\Omega \varphi(X)\,\6\fP\;.
\end{equation}\end{definition}](img427.png)

![$\displaystyle = \fP X^{-1}(]-\infty,t]) = \int_\R \indicator{]-\infty,t]} \6\,(\fP X^{-1}) = \int_{-\infty}^t \6\,(\fP X^{-1}) \;.$](img430.png)
